“文件+”服务上百家大型企业客户![]()
“文件+”服务上百家大型企业客户
![]()
![]()
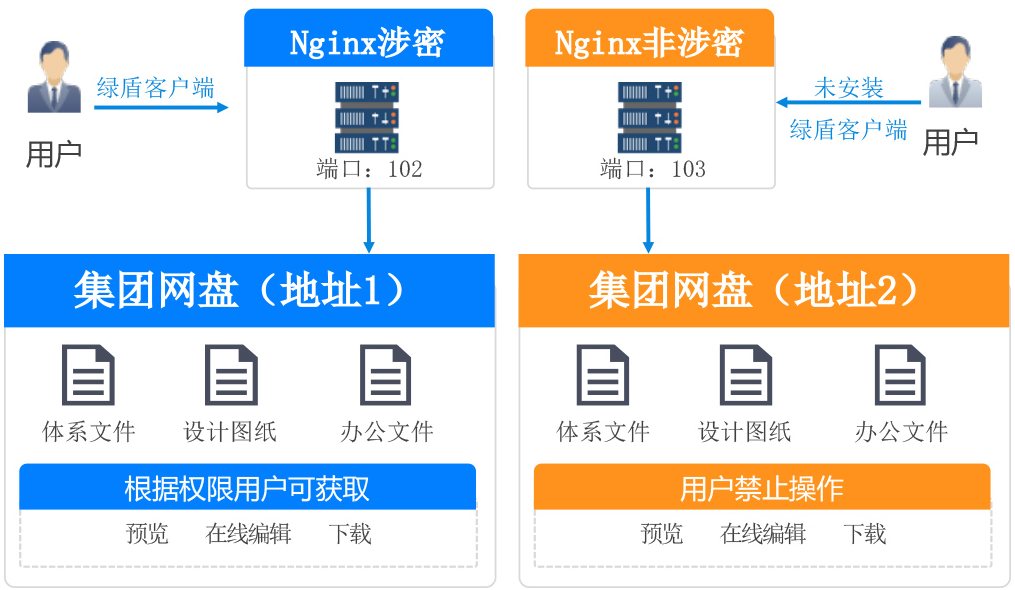
研发网涉密区域与非涉密区域文件安全交换
深圳未来机器人由香港中文大学、日本东京大学博士团队联合创办, 通过加装独有的高性价比视觉导航无人化模块,将人工叉车、牵引车、港机等工业车辆升级改造为无人驾驶工业车辆(AGV搬运机器人)业务遍及全球30多个国家和地区,在全球累计销售1000+产品,落地200+项目,与50+世界500强企业达成了合作,业务覆盖汽车制造、轮胎、食品、石化、电商、3PL、制药等多个领域。 是全球领先的工业无人车辆及内部物流无人化方案供应商。

【面临问题】
未来机器人因其是全球领先的工业无人车辆及内部物流无人化方案的供应商,因此涉及到各种行业大量的研发文件,未来机器人面临着涉密环境及正常办公环境下的不同文件管控措施,需要将运行环境进行分离处理,但是又要满足日常办公的使用需,这种现状给未来机器人造成很大的困境,无法在兼顾正常文控的要求下实现对涉密文件的安全保障。
【解决方案】
借助开始云采用kabala网盘+KFS中间件及网段隔离手段,将未来机器人的使用环境根据IP限制分离成涉密环境和非涉密环境,通过技术手段实现文档的区域隔离。即在非涉密网段系统将自动限制文件的下载,分享,传送等高危行为,在涉密网段内,才可以安全规范的操作文件。
【项目价值】
首先,未来机器人拥有了统一的文管平台,使各类研发软件有效的归档,实现统一管理,使其那些宝贵的研发文件得以保存和传承下去,为未来机器人更多的创新方面奠定了坚实的基础,逐步实现企业文档管理的规范化和电子化,提高了工作效率。其次,开始云为未来机器人打造的涉密区域隔离方案,既可以完美的保证正常企业工作中非涉密环境下的文管操作,同时也兼顾了涉密区域下的高危行为限制,通过先进的技术手段保障了未来机器人研发安全性与私密性。